The Six Degrees Of Freedom
In the precision motion industry, the goal is to achieve certain performance specifications for an applications movement profile. The movement profile can range from simple to complex, but is always based on at least one, if not all of the six degrees of freedom.
The six degrees of freedom refers to the freedom of movement of a rigid body in three-dimensional space. Specifically, the position and orientation of a rigid body in space is defined by three components of translation and three components of rotation.

Translation components:
1. Moving forward/backward on the X-axis
2. Moving left/right on the Y-axis
3. Moving up/down on the Z-axis
Rotation components:
1. Tilting side to side on the X-axis (Roll)
2. Tilting forward/backward on the Y-axis (Pitch)
3. Turning left/right on the Z-axis (Yaw)
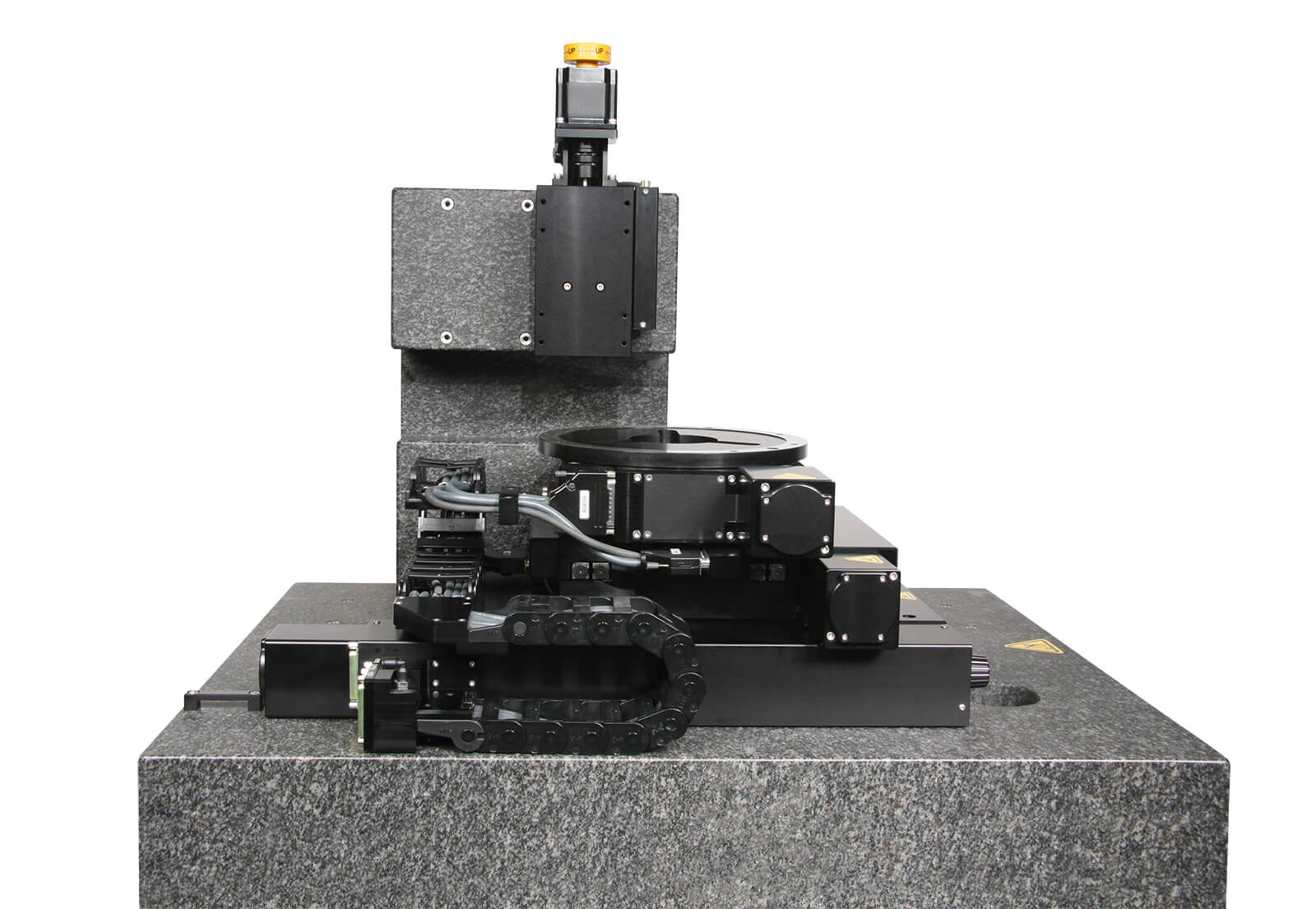
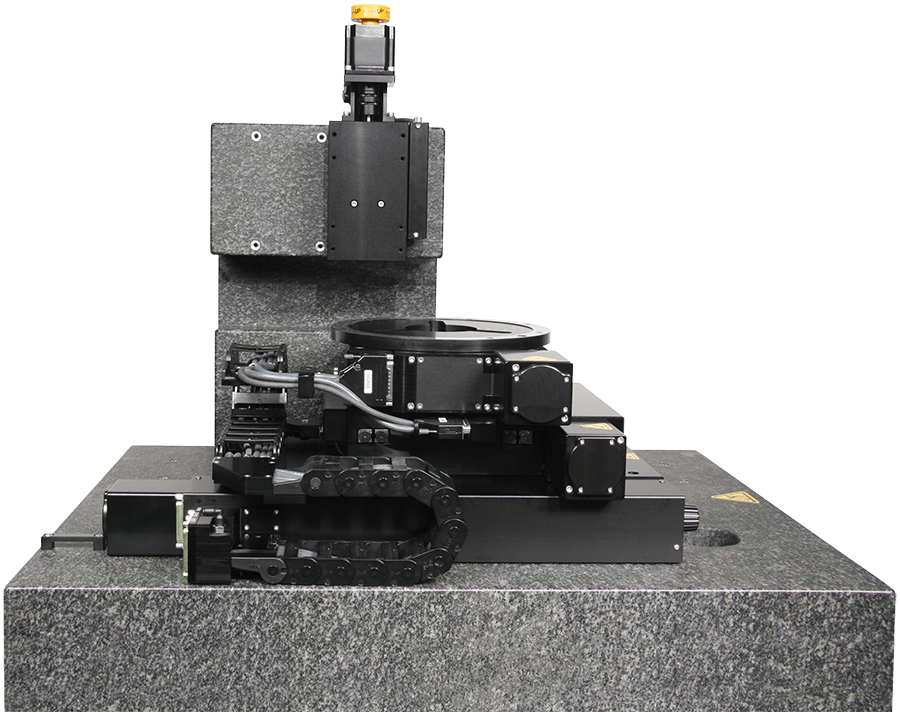
Examples of stages with various "degrees of freedom"
Single Axis Stage


Single Axis Stage
Two Axis Stage (XY)


Two Axis Stage (XY)
Three Axis Stage (XYZ)

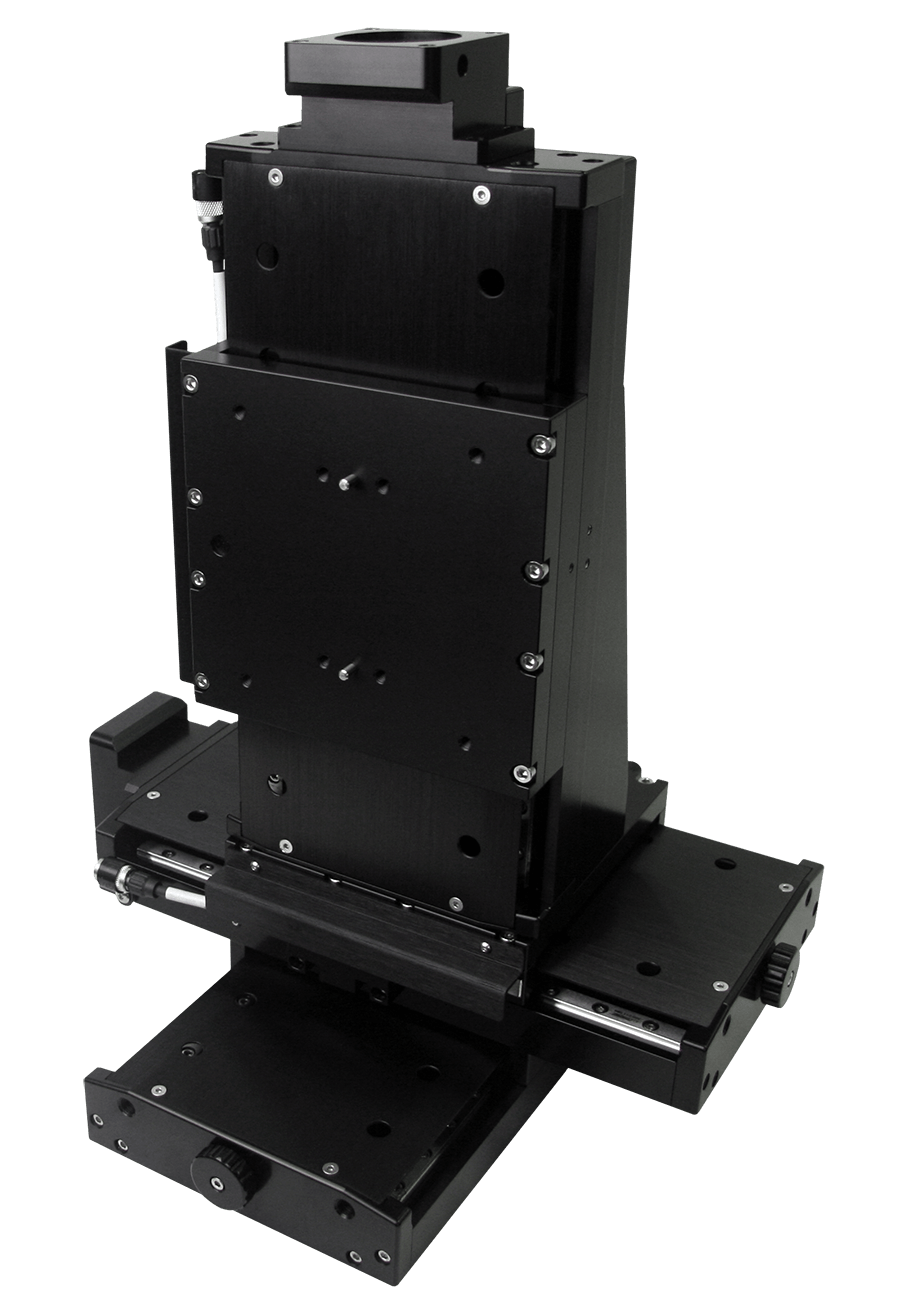
Three Axis Stage (XYZ)
Four Axis Platform (XYΘZ)